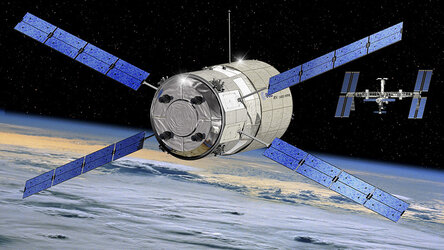
ATV-1 Jules Verne
The first ATV was named after French the 19th century French author and visionary Jules Verne, who fascinated the minds of million of young people and inspired space scientists and explorers with his extraordinary voyages: From the Earth to the Moon, 20 000 leagues under the sea, Journey to the Centre of the Earth, to name just a few.
The mission of this first ATV was an extraordinary voyage and celestial journey of its own kind. Its task was to demonstrate that ATV can accomplish the cargo flight to the ISS safely and reliably, and that all the advanced technologies ATV carries work as planned.
Therefore the mission of Jules Verne was different from the textbook missions that the ATV in future will use. It was launched from Kourou on 9 March 2008 at 01:03 local time (05:03 CET) and after transfer flight and several demonstration manouvres Jules Verne docked to the aft port of Russia’s Zvezda module at 16:45 CEST (14:45 GMT) on 3 April 2008. Docking was completed with hooks closing at 16:52 CEST (14:52 GMT).
Launch and Early Operations Phase
This phase of the mission lasted a few hours. It started with the launch of ATV on a modified Ariane-5 and ended a few hours after ATV separation from the launcher. During this phase, ATV is switched on, the propulsion system is primed, solar arrays are deployed and GPS is turned on.
|
Launch countdown (HH:MM:SS) |
Critical events |
| - 05:30:00 hrs |
ATV Ground Segment launch readiness status (GO/NO-GO) to the ATV Launch Mission Manager Readiness to the ATV-CC, international partners and network Before start of Ariane 5 EPC (*)/main stage fuelling |
| - 02:00:00 hrs |
Final ATV data exchange between ATV-CC and Kourou Loading of ATV latest software data in the ATV |
| -00:10:00 hrs |
Final ATV Ground Segment Launch readiness GO status |
| - 00:08:00 hrs | ATV in launch configuration, power autonomous |
| - 00:07:00 hrs | Start of Ariane 5 automatic sequence |
| - 00:00:03 hrs | Ariane 5 inertial platform release |
|
Main engine start KOU 01:03 04:03 UT 05:03 CET |
Ariane 5 Vulcain engine/EPC ignition |
| Time since main engine start | Critical events |
| + 00:00:07 hrs | Solid boosters (EAP) ignition and lift-off |
| + 00:02:18 hrs | Solid boosters (EAP) separation - 138 seconds |
| + 00:03:29 hrs | Fairing jettisoned - 209 seconds |
| + 00:09:08 hrs | First stage (EPC)/upper stage (EPS) separation |
| + 00:09:08 hrs | Upper stage (EPS) engine ignition - 8 minutes |
| + 00:17:15 hrs |
Ariane 5 end of EPS 1st thrust Beginning of ballistic phase - 45 minutes |
| + 01:02:10 hrs | Ariane 5 beginning of EPS second thrust |
| + 01:02:42 hrs |
Ariane 5 end of EPS second thrust: orbit injection Start of Ariane 5 SCA phase Start of ATV telemetry Initialization of the ATV propulsion system Check of ATV status by ATV-CC |
| + 01:06:41 hrs | Separation of ATV from upper stage |
| Time since ATV separation | Critical events |
| + 00:25:00 hrs | Autonomous ATV navigation control from star-trackers sensor inputs |
| + 00:30:00 hrs |
Solar array deployment (automatic) Maximum duration - 10 minutes (nominal 330 seconds) |
| Approx. + 02:00:00 hrs | Deployment of the Proximity Link boom, necessary for final approach to ISS |
| Approx. + 05:00:00 hrs | End of Launch and Early Operations Phase (LEOP) |
EPC= Etage Principal Cryotecnique/ Cryogenic main stage
EPS= Etage a Propergols Stockable/ Storable propellant stage (upper stage)
EAP= Etage d’Acceleration a Poudre/ Solid rocket boosters
2. Transfer, Phasing and Parking
Phasing lasts about nine days. A set of orbital manoeuvres planned by ATV-CC were executed to take the ATV from its injection point to its parking orbit, 2000 km ahead of the ISS. The main objective was to demonstrate ATV's capability to execute the Collision Avoidance Manoeuvre (CAM), if a CAM were to be actually executed.
| Distance to ISS | Critical events |
| Phasing | Attitude control performance is tested to verify ATV can hold its position
|
| Orbital control is tested to verify the execution of the ATV's orbital manoeuvres
|
|
| Navigation on absolute GPS is tested
|
|
|
14 Mar CAM Demo |
Collision Avoidance Manoeuvre (CAM) is demonstrated
|
|
19-Mar Arrival at Parking Orbit: 2000 km in front of ISS |
After about 10 days in orbit, ATV holds its position 2000 km away from ISS to allow the completion of the STS-123 mission. The next approach steps will only be undertaken once STS-123 has landed
|
|
27-Mar
|
|
|
29-Mar
|
Start of Demo Day 1 |
*S: Station keeping points where ATV pauses and mission control checks ATV. They are numbered from S-5 (100 km away from the ISS) to S41 (12 metres away from the ISS)
3. Demonstration Day 1 - 29 March 2008
The first Demonstration day checked that Jules Verne ATV can perform relative navigation with the ISS, using relative GPS successfully, and safely manoeuvre the ATV to the S2 station keeping point, located 3.5 km behind the ISS, at the same orbital altitude. A test of the escape manoeuvre – similar to the CAM – was also done.
| Distance to ISS | Critical events |
| *S-1/2 (39 km behind and 5 km below) | 15:19 CET - Relative GPS using the relative positions of ATV and ISS to manoeuvre the ATV to S-1/2
|
| S0 (30 km behind and 5 km below) | Pre-homing. Proximity Link acquisition - ATV can now send and receive data from the ISS.
|
| S1 (15.5 km behind and 5 km below) | 16:05 CET - Homing
|
| S2 (3.5 km behind and 100 m above) |
16:51 CET - Station keeping point. External lights are activated. Russian Kurs radar-based system is activated and the ISS crew can begin using this data. Test of ISS crew commands HOLD and RETREAT (no motion will occur for this test).
|
| S-1/2 (39 km behind and 5 km below) | Once the Escape is performed, ATV will eventually be commanded to return to S-1/2. ATV-CC will analyse the flight results and give the go ahead to conduct Demonstration day 2.
|
*S: Station keeping points where ATV pauses and mission control checks ATV. They are numbered from S-5 (100 km away from the ISS) to S41 (12 metres away from the ISS)
4. Demonstration Day 2 - 31 March 2008
The second Demonstration day tested ATV's close proximity manoeuvring and control, including testing contingency manoeuvres for ATV-CC and the ISS crew. ATV manoeuvred to within 11 metres of the docking port located on Zvezda, the Russian Service Module of the ISS.
| Distance to ISS | Critical events |
| *S-1/2 (39 km behind and 5 km below) | 14:26 CEST - ATV in waiting mode for go ahead
|
| S0 (30 km behind ISS and 5 km below) | Pre-homing. GNC Initialization for Relative GPS navigation. Proximity Link acquisition - ATV can now send and receive data from the ISS.
|
| S1 | 15:12 CEST - Homing starts. Relative GPS navigation.
|
| S2(3.5 km behind and 100 m above) | 15:58 CEST - Station keeping point. External lights are activated. Russian Kurs radar-based system is activated and the ISS crew can begin using this data. Closing begins using Relative GPS.
|
| 500 m | Video system of Zvezda turned on for ISS crew to view ATV on the Simvol screen.
|
| S3(249 m behind) |
17:10 CEST - Station keeping point. The Videometer and Telegoniometer (laser-pulsed instruments that calculate the distance and orientation to the ISS) are activated. Videometer is used as the prime sensor for GNC navigation. Go for Final Approach 1.
|
| S4(19 m behind)
|
18:13 CEST - Station keeping point. Close range videometer navigation is used. Pointing manoeuvre towards the Docking Port axis. Go for Final Approach 2.
|
| S41(11 m behind) | 18:31 CEST - Station keeping point. ATV holds its position at this station keeping point. The ISS crew send the RETREAT command to S4
|
| S4(19 m behind)
|
18:38 CEST - ESCAPE is commanded to bring ATV to a safe orbit with respect to the ISS Station keeping point. On MCC-M Go, ISS crew issue the ESCAPE command and monitor the ATV
|
| S-1/2(39 km behind and 5 km below) | ATV is in waiting mode for the go ahead for final docking approach
|
*S: Indicates station keeping points or way points. Way points (all points before and including S-1/2, S0, and S1) are situated on a lower orbit than ISS. ATV is closing in on the ISS during Way points. Station Keeping points (S2, S3, S4, and S41) are situated on the same orbit as the ISS, meaning that ATV "stops" relative to the ISS. During both Station Keeping points and Way points, the ATV-CC and MCC-M check the status of their relevant systems and allow commands to be sent to begin performing new navigation and monitoring modes when required.
5. Rendezvous and Docking - 3 April 2008
As Jules Verne got closer to its objective, ATV-CC mission controllers directed the ATV in a step-by-step approach. This required authorisation from the Russian Mission Control Centre in Moscow (MCC-M), since ATV docks with Zvezda, the Russian segment of the ISS.
| Distance to ISS | Critical events |
| *S-1/2(39 km behind and 5 km below) | - ATV in waiting mode for final go ahead
|
| S0(30 km behind and 5 km below) | Pre-homing
|
|
S1 (15.5 km behind and 5 km below) S1 planned GO 13:17 CEST |
- Homing starts
|
|
S2(3.5 km behind and 100 m above) S2 arrival 14:04 CEST S2 depart 14:36 CEST |
- Station keeping point. External lights are activated. Russian Kurs radar-based system is activated and the ISS crew can begin using this data. Closing begins using relative GPS.
|
| 500 m | Video system of Zvezda turned on for ISS crew to view ATV on the Simvol screen.
|
|
S3(249 m behind) S3 arrival 15:16 CEST S3 depart 15:52 CEST |
- Station keeping point. The Videometer and Telegoniometer (laser-pulsed instruments that calculate the distance and orientation to the ISS) are activated. Videometer is used as the prime sensor for GNC navigation. Go for Final Approach 1.
|
|
S4(19 m behind) S4 arrival 16:13 CEST S4 depart 16:29 CEST |
- Station keeping point. Close range videometer navigation is used. Pointing manoeuvre towards the Docking Port axis. Go for Final Approach 2.
|
|
S41 (11 m behind) S41 arrival 16:31 CEST S41 depart 16:37 CEST |
- Station keeping point. Go to continue the Final Approach 2.
|
|
Capture 16:40 CEST Hooks closed 17:14 CEST |
ATV docks to Zvezda ATV permanently connected to Zvezda
|
*S: Station keeping points where ATV pauses with respect to the ISS and mission control checks ATV.
At the end of a flawless six-month mission, Jules Verne, Europe’s first Automated Transfer Vehicle, undocked from the International Space Station today at 23:29 hours CEST. The ATV has now embarked on the last leg of its journey in space, which will end with a controlled destructive re-entry into the Earth’s atmosphere on 29 September.