Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland


























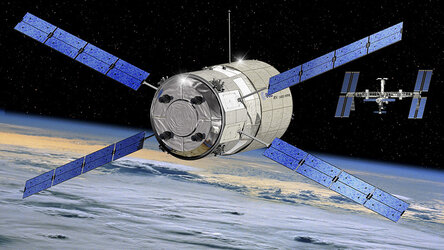
Le « Jules Verne » démontre des capacités essentielles à sa mission
Aujourd'hui, l'ATV « Jules Verne » a démontré sa capacité à naviguer en toute sécurité depuis un point situé à 39 km derrière l'ISS jusqu'à un point de stationnement à tout juste 3,5 km en utilisant une navigation par GPS relatif. Le vaisseau a ensuite exécuté une manœuvre d'éloignement commandée par le Centre de contrôle de l'ATV qui l'a amené à se retirer jusqu'à une distance de sécurité.
« Tous les systèmes ont été parfaitement nominaux, ce qui est très satisfaisant pour cette première journée où nous avons vraiment testé les capacités de rendez-vous du véhicule, » s'est félicité John Ellwood, chef du projet ATV à l'ESA.
La démonstration d'aujourd'hui a aussi confirmé que le « Jules Verne » est capable d'établir une liaison bidirectionnelle continue avec l'ISS pour l'échange de données. Grâce à cette liaison à haut débit en bande S, qui a été établie à une distance de 40 km de l'ISS, le « Jules Verne » a pu pour la première fois effectuer des mesures en GPS relatif avec la Station. Le GPS relatif est une technique de navigation qui permet aux calculateurs de l'ATV de comparer les données fournies par les récepteurs GPS de l'ATV et ceux de l'ISS pour naviguer avec grande précision par rapport à la Station.

Pour l'équipe de contrôle à Toulouse comme pour l'équipage de l'ISS, cette liaison à 64 kbits/s a aussi rendu possible la démonstration de toutes les connexions cruciales de communications et d'échanges de données entre le vaisseau et la Station, y compris la capacité pour les systèmes de surveillance de chacun d'envoyer et de recevoir des informations.
Quand le « Jules Verne » a atteint son point de stationnement le plus proche, à 3,5 km de l'ISS, le vaisseau (de la taille d'un gros autobus) a allumé ses feux de position et le système russe de transpondeurs radar Kours a été activé sur l'ATV et l'ISS. Ce système, utilisé depuis des décennies sur les stations et les véhicules russes, fournit une évaluation indépendante de la distance et de la vitesse relative pour l'équipage surveillant l'approche finale du « Jules Verne ».

Au cours de la démonstration, les astronautes à bord de l'ISS ont signalé qu'il leur avait été possible de voir le « Jules Verne » à l'œil nu. Le vaisseau pouvait aussi être suivi via les différentes caméras de l'ISS sur les écrans de l'ATV-CC. « Pour l'équipe de contrôle, pouvoir voir les allumages des propulseurs de contrôle d'attitude de l'ATV sur les écrans a été particulièrement excitant et a rendu tout cela un peu plus vivant » a relevé Bob Chesson, chef des opérations vol habité à l'ESA. « C'était fantastique de retrouver le “Jules Verne” et de le voir fonctionner si parfaitement, ce qui est de bon augure pour les jours à venir. »
Les données recueillies au cours de cette première journée de démonstration vont maintenant être analysées par l'équipe JADOR (Jules Verne ATV Demonstration Objectives Report) de l'ESA. Un rapport sera ensuite soumis à l'IMMT (ISS Mission Management Team). Après évaluation et autorisation le 30 mars, l'ATV pourra poursuivre sa mission avec une seconde journée de démonstration lundi, qui comprendra une approche jusqu'à 11 m de la Station.
« Les premières analyses du JADOR ont l'air bonnes. Nous allons passer quelques heures à les analyser plus en profondeur, maintenant. Nous sommes plutôt confiants, » a déclaré Alberto Novelli, chef de mission ESA à l'ATV-CC.