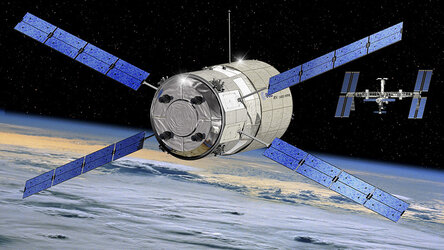
Jules Verne demonstrates flawless Collision Avoidance Manoeuvre
Mission controllers received confirmation shortly after 10:45 CET (09:45 UT) this morning that Jules Verne ATV had successfully demonstrated the critical Collision Avoidance Manoeuvre. The crucial test began at 08:57 CET (07:57 UT), and included placing the spacecraft into a minimally functioning 'survival' mode.
The in-flight Collision Avoidance Manoeuvre, or CAM, demonstration was necessary to prove that the spacecraft could reliably move away from the ISS in case of any problems during the final rendezvous and docking with the International Space Station. Upon detection of a critical failure or an unsafe situation, the spacecraft's Monitoring and Safing Unit (MSU) is designed to isolate the ATV's nominal systems and issue a CAM command.
"It went perfectly - the MSU commanded ATV exactly as expected. After that, we had a perfect recovery of the spacecraft, from sun-pointing safe mode, and we reset the on-board computers. ATV is back in cruise mode," said Alberto Novelli, ESA's Mission Director at the ATV Control Centre in Toulouse, France.

The complex procedure involved shutting down all of the normal control systems and placing the spacecraft into 'last-chance' survival mode. After the manoeuvre was positively demonstrated and confirmed, controllers implemented a lengthy 'exit-from-survival' recovery process that brought all systems back into nominal operation.
"The performance was absolutely flawless. We know now that it is completely safe for us to go to the Station because we always have an independent way to get away from it. This demonstrates that our back-up 'spacecraft within a spacecraft' works perfectly - it's good to have this tool in our back pocket," said John Ellwood, ESA's ATV Project Manager.
An enhanced team of some 60 mission controllers from ESA and French space agency CNES watched this morning's test intently from the ATV Control Centre. If any problems had occurred during survival mode, it would have been very difficult to recover the spacecraft.

"This independent mode relies on separate computers, separate software, separate batteries, separate trajectory monitoring sensors and separate thrusters. The only item shared with the ATV's main system is propellant," explained ESA astronaut Jean-François Clervoy, senior advisor to the ATV project.
The test was conducted with ATV orbiting well away from the ISS, and included a 200-second thruster burn, which took place as the spacecraft passed over northern Africa. A final orbit determination will be done later today.
The CAM demonstration was also monitored closely by ESA's ISS partners, with NASA operations personnel seated on console in the ATV Control Centre. The US and Russian ISS control centres and ESA's Columbus Control Centre also monitored the test. One important result of the demonstration was to prove to the partners that the CAM functionality was reliable and could assure the safety of the Station and crew members. The CAM demonstration results are now being analysed by the ISS partners.
Additional demonstrations of Jules Verne's functionality are scheduled later in the month, with actual rendezvous and docking planned for 3 April 2008.