Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland



























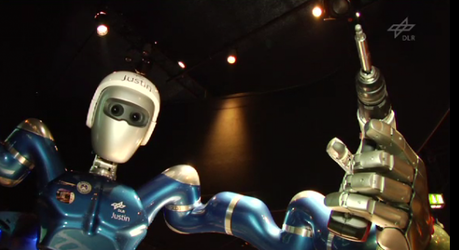
Astronauta Gerst steruje z kosmosu łazikiem wielkości samochodu
Patrząc w dół z orbity, astronauta Europejskiej Agencji Kosmicznej - Alexander Gerst - sterował łazikiem ESA - Eurobotem, wykonując nim serię skomplikowanych manewrów na Ziemi. Była to jednocześnie demonstracja działania nowej kosmicznej sieci, mogącej łączyć astronautów z pojazdami na obcych planetach.
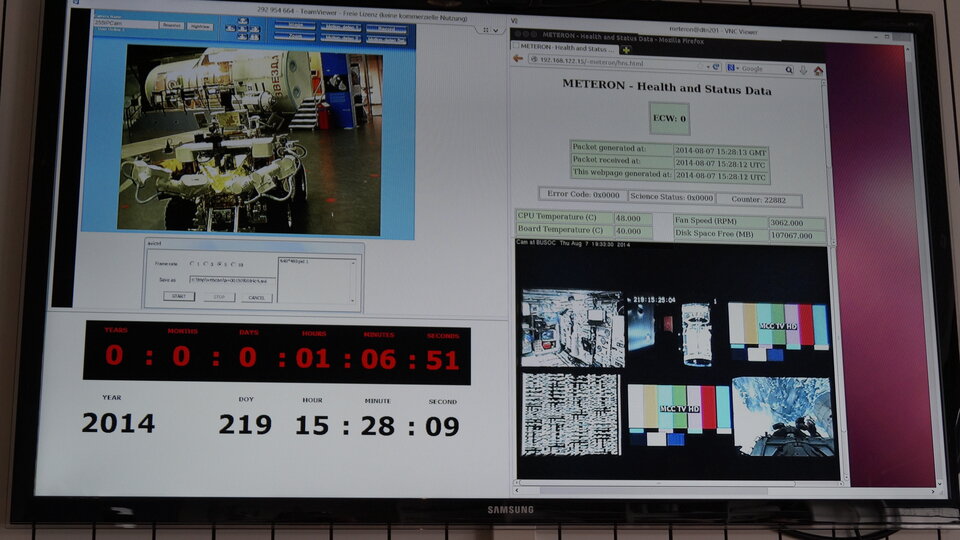
W trakcie intensywnego 90-minutowego połączenia na żywo 7 sierpnia, do kierowania Eurobotem Alex używał dedykowanego laptopa na Międzynarodowej Stacji Kosmicznej – komendy wysyłał, na podstawie obrazu wideo i napływających danych zwrotnych, orbitując na wysokości 400 km z prędkością 28 000 km/h.
Połączenie zostało nawiązane poprzez nową sieć, która magazynuje komendy w przypadku, gdy przerwana zostanie widoczność z Ziemią (co oznacza przerwanie łączności z jednostką naziemną) i przesyła je, gdy kontakt zostanie nawiązany ponownie.
W przyszłości kontrolowanie robotów na Marsie czy Księżycu będzie wymagało czegoś w rodzaju „kosmicznego Internetu” do przesyłania komend i odbioru danych. Takie sieci będą musiały kompensować opóźnienia w przesyłaniu sygnałów na wielkie odległości, biorąc pod uwagę, że astronauci i łaziki na Marsie będą musieli łączyć się z kontrolerami misji na Ziemi.


Access the video
Pokaz z 7 sierpnia był drugim z serii eksperymentów w ramach projektu Meteron. Pierwszy test przeprowadziła w 2012 roku astronautka NASA Sunita Williams, która, używając pierwszej wersji takiej sieci, sterowała modelem łazika w centrum operacyjnym ESA (ESOC) w Darmstadzie w Niemczech.
„Eurobot po raz pierwszy był kontrolowany z przestrzeni kosmicznej w ramach eksperymentu mającego przetestować łączność i technologie operacyjne, które ostatecznie będą używane w przyszłych załogowych misjach eksploracyjnych” – podkreślił Kim Nergaard, kierownik Advanced Mission Concepts and Technologies Office (biuro koncepcji i technologii zaawansowanych misji) w ESOC.
Prawo jazdy na łazik
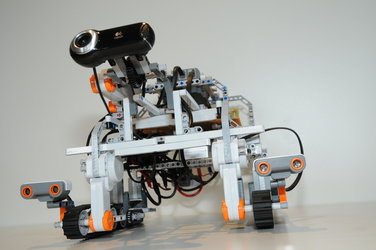
Podczas sesji rozpoczętej o 16:35 GMT (18:35 CEST), kierując się telemetrią i obrazami przesyłanymi z łazika do Stacji, Alexander Gerst wydawał Eurobotowi komendy poruszania się i wykonywania zdjęć.
Eurobot poruszał się po wyznaczonym obszarze w centrum technologicznym ESA ESTEC w Noordwijk w Holandii, podczas gdy „kontrola naziemna” mieściła się w ESOC, a odporna na zakłócenia sieć była dodatkowo przekierowywana przez belgijskie centrum operacji ISS - B.USOC (Belgian User Support and Operations Centre) w Brukseli i infrastrukturę NASA.
Gotowy to jazdy
Symulacje przygotowujące opisywaną operację wykonywano w lipcu i obejmowały one połączenia na żywo między Darmstadt, Noordwijk i Brukselą a Stacją Kosmiczną.
„Uzyskany wynik jest nawet lepszy niż w przeprowadzonych symulacjach” – powiedziała Daniela Taubert, koordynatorka działań w ramach projektu Meteron. „Cały eksperyment przebiegł bardzo płynnie. Alex był szybszy i skuteczniejszy niż zakładaliśmy”.
„Wspaniale jest móc w praktyce przetestować element długoterminowej strategii ESA, która zakłada wysłanie ludzi i robotów w celu eksploracji naszego Układu Słonecznego” - ocenił William Carem, inżynier projektu Metron.
Przyszła eksploracja kosmosu będzie najpewniej obejmowała wysyłanie zrobotyzowanych próbników w celu zbadania obcych powierzchni, nim wylądują na nich ludzie. Aby się do tego przygotować, ESA uruchomiła program eksploracji załogowo-zrobotyzowanej Meteron, czyli Multi-Purpose End-To-End Robotic Operations Network.
Więcej zdjęć zespołu i działań w ESOC na Flickr.