

Planetary Robotics Laboratory
What is its role?
ESA’s Planetary Robotics Lab is part of the Automation and Robotics Labs, together with the Telerobotics and Haptics Lab and the Orbital Robotics Lab. It supports planetary robotics projects throughout their life cycle. Its work begins with the initial investigations, validation and demonstration of new concepts by means of technical analysis, simulation and prototyping, going on to provide assistance with development problems during implementation, then verification that the completed hardware is able to meet mission needs.
Continue reading below
How is it equipped?
The Planetary Robotics Laboratory is equipped with a number of specialised facilities:
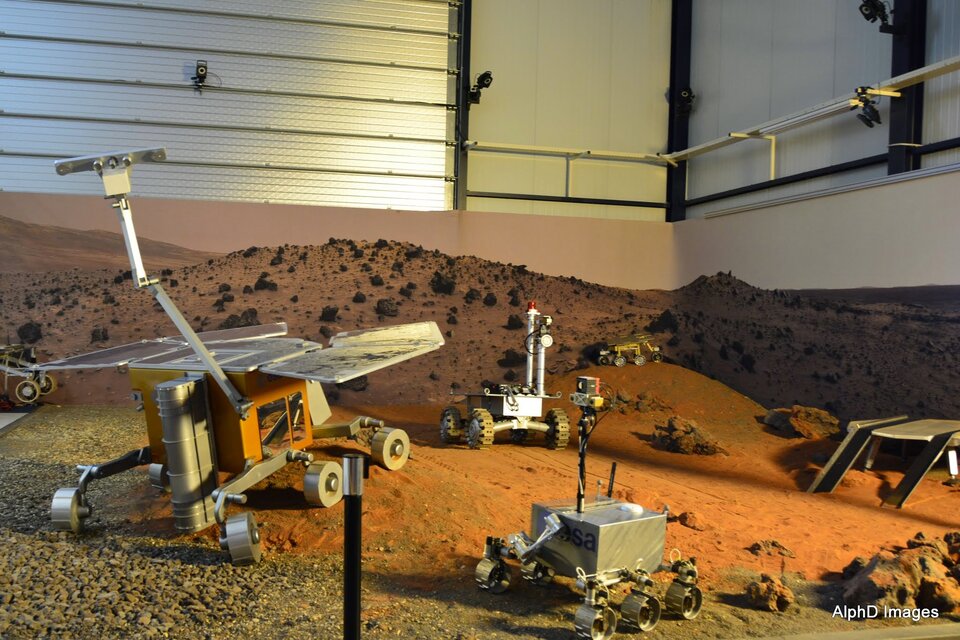
- Planetary Utilisation Testbed (PUTB) – a square 9m by 9m terrain ‘sandbox’ filled with different sizes of sand, gravel and rock, equipped with precision measurement systems such as the Motion Capture Vicon Camera system that provides ground truth localisation data
- Specialised measurement systems – including a RIEGL LMS-Z210I Terrestrial Laser Scanner for 3D measurement of objects or terrain (DEMs) or the Nikon K600 Optical Measurement and Calibration System that computes very accurate 3D calibration data, or the Trimble differential GNSS system for accurate outdoor localisation, or various inertial measurement units for dead reckoning
- Several Rover modelsincluding:
- ExoTeR – The ExoMars Testing Rover is a half-scale reproduction of the ExoMars rover that mimics the locomotion and navigation subsystems of the real rover. It also incorporates a 5-DoF arm manipulator and on-board sensors for localisation and navigation
- Heavy Duty Planetary Chassis – High-speed medium-size payload carrying rover locomotion platform with a remarkable payload to mass ratio
- Lunar Rover Model (LRM) an heavy-payload-capacity rover with large amount of sensors (stereo camera rigs, Time-of-flight 3D cameras, omnicam)

- Rover Autonomy Testbed (RAT) – An end-to-end technology testing environment for investigating the level of autonomy most appropriate to specific communications constraints. RAT integrates the LRM, and a control ground station, connected through a communication tweaker that allows simulation of different bandwidths, delays, jitter
- Terramechanics measurement systems – assessing rover performance in terms of vehicle- and wheel-soil interaction, including single-wheel and whole-rover measurement systems as well as simulators
- COMAU NJ130 Industrial Robot – 6 DoF industrial robotic arm with a payload capacity of 130Kg capable of simulating free motion of a rigid body in 3D
- Computing facilities – State-of-the-art commercial computer tools including kinematic and dynamic simulation of robot systems, computer-aided control system design, real-time control software development, 3D visualisation development, computer vision application development and video production.
What services does it offer?

The Lab is covered by the overall ISO9001:2008 certification of the Automation and Robotics Laboratories services. The certified services are Automation and robotics concept definition, breadboarding for ESA/ESTEC internal customers; project support and public relations demonstrations for external organisations.
Robotics is a fascinating subject, enabling a lot of interesting research activities. However it is important to understand that for ESA planetary robots are just a convenient tool to operate scientific payloads on remote environments, thereby facilitating ESA’s goals in space science and exploration.
So ESA’s Planetary Robotics Lab services focus on proving that a robot and its scientific payload can work as an effective means of scientific investigation/exploration.
The Lab supports ESA-wide research, development and testing of the two main robot types used in planetary robotics: rover platforms and sampling/sample manipulation systems.
For rovers, the Lab’s equipment and expertise allow overall concept prototyping, assessment and testing of locomotion means, navigation and localisation means, logical autonomy, commanding and monitoring means.
For sampling/sample-manipulation systems the Lab offers support for assessment of feasibility of manipulators and tools, prototyping and testing of them and finally assessment of the interaction with the environment and the instrument/equipment they serve.
Who are its customers?

The Planetary Robotics Laboratory supports a large number of ESA and external projects. Many of the technologies intended for ESA planetary missions have been assessed and integrated in the Lab. In fact all basic technology research in planetary robotics, commissioned by ESA for European industry and academia to design, is finally tested in here.
The Lab has also worked to evaluate a number of planetary probes before they even reached the drawing board: with ExoMars the most prominent example, the Laboratory also evaluated microrobots for the original BepiColombo mission, for the proposed MarsNet mission and aerobots for a return to Titan.
How do I find out more?
Contact Laboratory Manager
Gianfranco Visentin
gianfranco.visentin@esa.int


