Novelty Search for Soft Robotic Space Exploration
The use of soft robots in future space exploration is still a far-fetched idea, but an attractive one. Soft robots are inherently compliant mechanisms that are well suited for locomotion on rough terrain as often faced in extra-planetary environments. Depending on the particular application and requirements, the best shape (or body morphology) and locomotion strategy for such robots will vary substantially. Recent developments in soft robotics and evolutionary optimization showed the possibility to simultaneously evolve the morphology and locomotion strategy in simulated trials. The use of techniques such as generative encoding and neural evolution were key to these findings. In this project, we improve further on this methodology by introducing the use of a novelty measure during the evolution process.
Generative Encoding
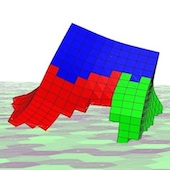
We use the technique of Compositional Pattern-Producing Networks (CPPNs) as a generative encoding to produce morphologies (i.e. shape and structure) of simulated soft robots. CPPNs are artificial neural networks with an extended set of activation functions. The set of activation functions can include repetitive, symmetrical, and linear functions. The CPPNs are queried for every coordinate of a lattice space to form a soft robot shape as well as to define the distribution of the materials.
Novelty Search
Unlike traditional fitness-based search, novelty search is an alternative way of optimization. Novelty search, evaluates new candidates with respect to their "novelty" when compared to all previously found solutions and not based on an objective function. The "novelty" measure is defined in the behavior space, which is a function of the phenotype. As an example, one can think of the behavior as the trajectory of a robot controlled by a neural network. A "novel" candidate will exhibit a trajectory that differs from all previously recorded trajectories.
Results
We found that well defined behavior metrics can lead novelty search to outperform traditional fitness-based search. Novelty search not only improved performance, but also contributed to a larger variety of morphologies. Finally, both techniques were used to evolve soft robots in four different gravity levels, showing interesting results and the possibility of influencing future robotic designs for planetary exploration.
References
- Lehman, Joel, and K. O. Stanley. 2008. "Exploiting Open-Endedness to Solve Problems Through the Search for Novelty." ALIFE.
- Cheney, N., et al. 2013. "Unshackling evolution: evolving soft robots with multiple materials and a powerful generative encoding." In Proceedings of the 15th annual conference on Genetic and evolutionary computation. ACM.