About ESA
The European Space Agency (ESA) is Europe’s gateway to space. Its mission is to shape the development of Europe’s space capability and ensure that investment in space continues to deliver benefits to the citizens of Europe and the world.
Highlights






Latest





Space in Member States
Find out more about space activities in our 23 Member States, and understand how ESA works together with their national agencies, institutions and organisations.
 Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland
Science & Exploration
Exploring our Solar System and unlocking the secrets of the Universe
Go to topicAstronauts











Latest










Enabling & Support
Making space accessible and developing the technologies for the future
Go to topicLatest





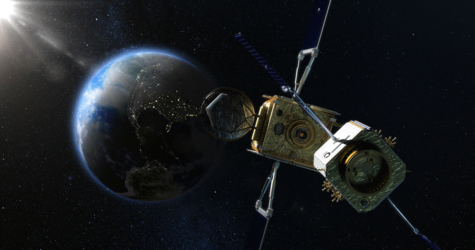
Animation of ESA's Geostationary Servicing Vehicle
Animation of ESA's Geostationary Servicing Vehicle. In the movie the GSV approaches atarget satellite (Olympus) following a series of Hohman manouvres. Then the GSV robot prepares the spacecraft by erecting the docking/rigidisation structure. Next the GSV approaches from behind Olympus and captures it by its main engine nozzle. This is done by the robot handling a dedicated capture tool. Since in this case Olympus spins, the GSV spins up to the same speed along the same axis. The stinger of the capture tool is inserted via the nozzle in the combustion chamber and expanded to prevent the target from escaping. During insertion, the robot continuously adjusts its motion based upon distance and contact force measurements. After latching, the tumbling motions is gradually eliminated by the robot arm and the capture tool, followed by berthing and docking of the two spacecraft. The robot arm then berths the spacecraft to the GSV by latching the (other end of the) capture tool into its fixed position. The robot arm is now released and picks up a tool from its toolbox. Next the robot reaches for the stuck solar array, releases it and deploys it into its operational position.