











 Germany
Germany
 Austria
Austria
 Belgium
Belgium
 Denmark
Denmark
 Spain
Spain
 Estonia
Estonia
 Finland
Finland
 France
France
 Greece
Greece
 Hungary
Hungary
 Ireland
Ireland
 Italy
Italy
 Luxembourg
Luxembourg
 Norway
Norway
 The Netherlands
The Netherlands
 Poland
Poland
 Portugal
Portugal
 Czechia
Czechia
 Romania
Romania
 United Kingdom
United Kingdom
 Slovenia
Slovenia
 Sweden
Sweden
 Switzerland
Switzerland

























Marcus Wandt guides robot team
In brief
ESA project astronaut Marcus Wandt operated from space a team of robots on Earth for the Surface Avatar experiment during his Muninn mission.
In-depth

In a room in Oberpfaffenhofen, Germany, there were three robots. There was equipment all around them and a team of engineers waiting for one person to take the next step in operating robots from space: Marcus Wandt.
The experiment is called Surface Avatar and is a collaboration between ESA and the German Aerospace Centre (DLR) to build a team of robots and an intuitive interface for the astronauts to operate them from afar.
"During his training, Marcus provided us with feedback of the robotic operations for Surface Avatar. This is a unique opportunity to have more astronauts test the robots and the interface we have developed,” said Thomas Krueger, head of ESA’s Human Robot Interaction Lab. “Working together with DLR on this project is great. We are sharing lessons learned and making something bigger than the sum of its parts.” added Thomas.
Choreograph robots from space

Ready at the controls on the Space Station, Marcus used the sigma 7 controller. The tool offers seven degrees of freedom and haptic feedback that allowed Marcus feel when the robot’s arm bumped into the objects in front of it.
In front of Marcus was also a screen with video feed from the robots, with the interface overlaying the live video. The Swedish astronaut could simply click on a button on the screen and change the speed of the robot’s movement, or switch between the video feeds from the different robots.
Marcus already got a taste of the Surface Avatar experiment when he visited ESA’s technical heart in the Netherlands, European Space Research and Technology Centre (ESTEC), half a year ago.
“While Marcus familiarised himself with the equipment of Surface Avatar during training on Earth, the exact task he had to complete today on the Space Station was new to him. That is the idea of the experiment: to test our intuitive interface with the robots and see how the astronaut works with the robots,” said Thomas.
Putting the pieces together
The three robots were Bert and Rollin’ Justin from DLR and ESA’s Interact rover. With those at his hands, Marcus went to work by looking for three objects with the little robot dog Bert, using the cameras on Bert and on Rollin’ Justin. The footage from Bert and Justin gave him an overview of the scene.
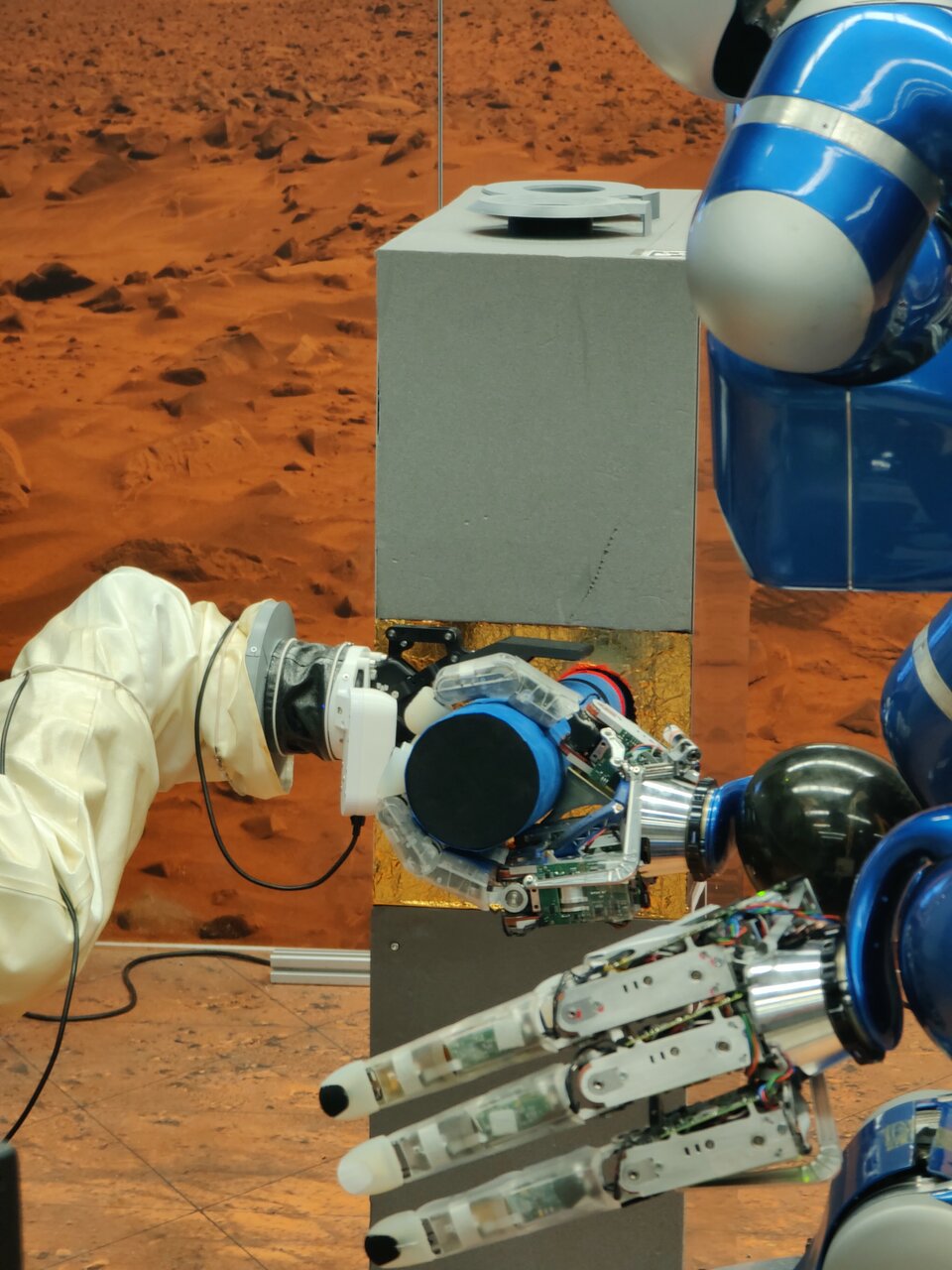
After successfully finding two aliens and a doll, he moved on to the next task: getting a peg in a hole with two robots working together. With both the Interact Rover and Rollin’ Justin having an arm on the peg, Marcus made sure Rollin’ Justin allowed the Interact rover arm to steer the peg in the hole, while Rollin’ Justin supported the peg. Getting the two robots to work together was no problem for Marcus, and he manoeuvred the peg into the hole using the arm of the Interact Rover.
Lastly, he used Rollin’ Justin to lift a handle, a task that might seem easy for a human, but for a robot it is not a simple one. The handle is attached at the end, so if Rollin’ Justin just lifted the handle straight up, the robot would lose the grip of the handle, since it would rotate away from Rollin’ Justin. After some small technical difficulties were ironed out by the Surface Avatar team in real time, Marcus managed to lift and lower the handle.
The experiment ended with Marcus providing valuable feedback to the Surface Avatar team, so they can improve the interface and pave the way for future sessions.
“Now it is time to go over all the feedback Marcus provided. It was a successful run of Surface Avatar and it is clear that Marcus has experience with working on new and unfamiliar equipment” said Dr. Neal Lii, Domain Head at DLR’s Institute of Robotics and Mechatronics.
From the Space Station to the Moon and beyond

The success of the Surface Avatar run with Marcus paves the way for future space exploration. When humankind returns to the Moon, a robot companion may be a good substitute for going on long moonwalks. If the astronauts could operate one or more robots from the safety of a lunar lander, the robot could scout out new areas or perform more mundane tasks, such as collecting rocks samples.
“The use of robotics is fundamental in all the phases of Moon exploration as defined in the Terrae Novae strategy, from the initial uncrewed missions to crewed missions where robotics will support astronauts. In the future, full autonomous robots will handle tasks using artificial intelligence, said Giorgio Magistrati, team leader for the Exploration Preparation, Research and Technology team at ESA.
Visit the Muninn page for more information on Marcus’s mission and check out his social media for updates about life and work on the Space Station.